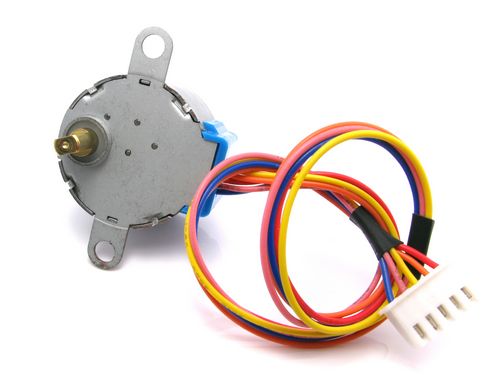
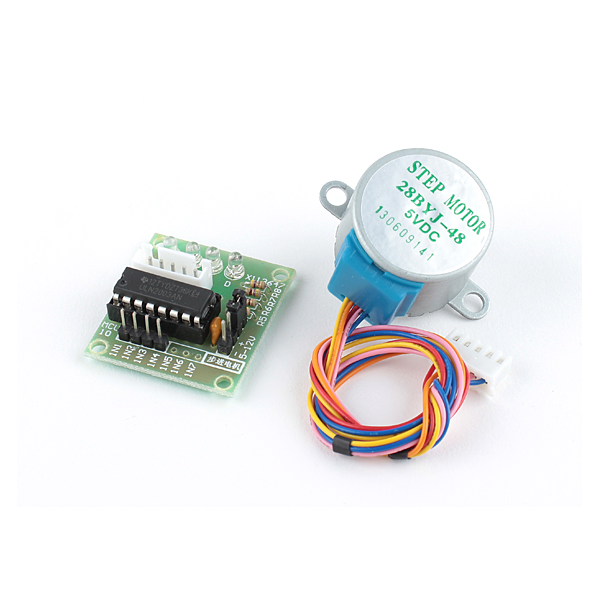
Шаговый двигатель 28BYJ-48 5V
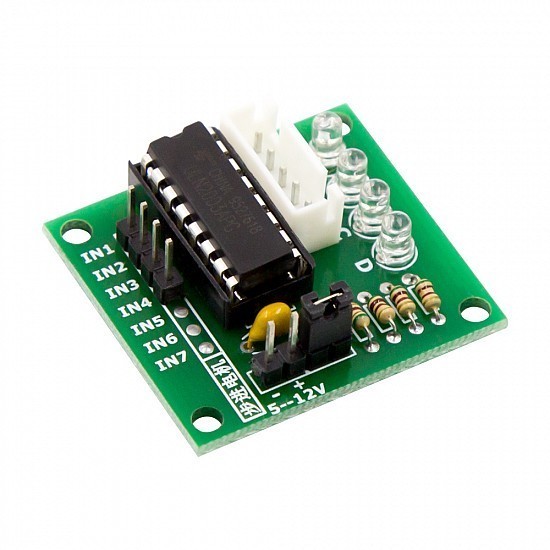
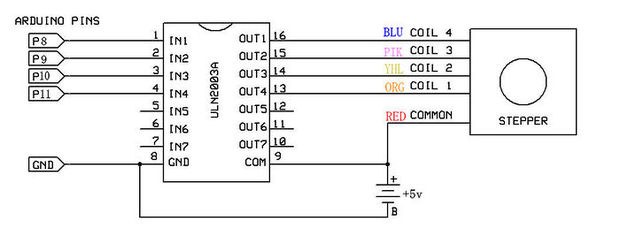
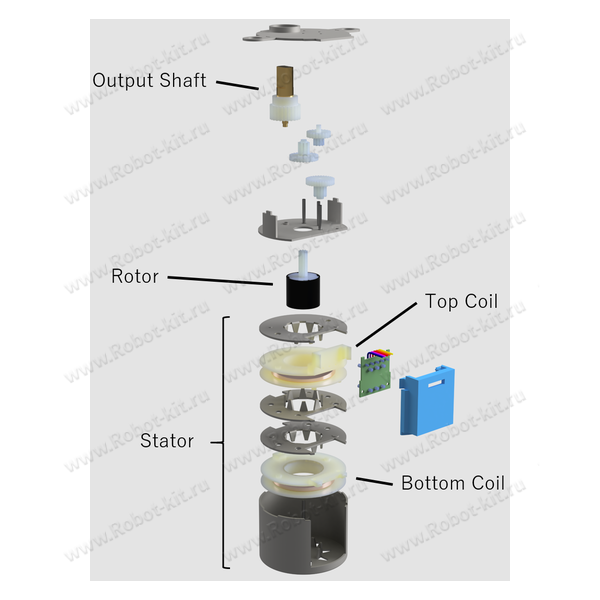
В статье мы подробно разберем принцип работы шагового двигателя 28BYJV , особенности и подключение драйвера на базе микросхемы ULN Дискретное перемещение вала двигателя 28BYJV позволяет повернуть вал ровно на 60 или градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.










Шаговый двигатель stepper motor предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper. В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели.







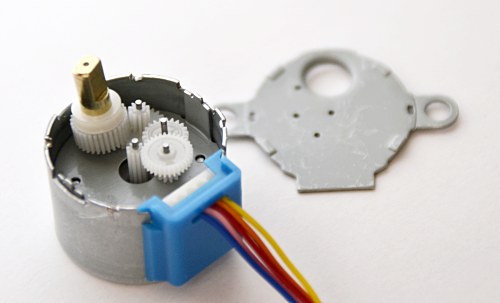

Основной принцип работы — преобразование электрических импульсов в дискретные механические перемещения. Для использования 4-фазного шагового двигателя сначала нужно собрать на его основе макет, создать программу управления и приступать к работе. На корпусе двигателя расположено два монтажных подвесных ушка для фиксации положения. Управление шаговым двигателем осуществляется с помощью специальных программ записанных в Arduino контроллер или в другое микропроцессорное управляющее устройство.